
Hi, I'm Bharatraj. I’m a Computer Engineering and Applied Mathematics student at MSU, currently serving as the Low Voltage Power Lead for our Formula SAE team. My recent work includes leading the electrical architecture for a formula-style vehicle, where I manage crucial power and communication signals. Beyond the Shop, I’ve developed motor control logic using computer vision, a project that recently took runner up at spartahack 11, and I’m currently studying graduate-level optimization to apply more rigorous decision-making frameworks to complex system integrations.

Low Voltage Power Lead at MSU Formula SAE. I lead the electrical architecture for our formula-style race car — wiring harness design, PCB development in Altium, and high-voltage system integration. My recent work includes a 33% rear harness mass reduction and custom PCB designs for brake system plausibility, analog-to-CAN conversion, and high voltage shutdown.
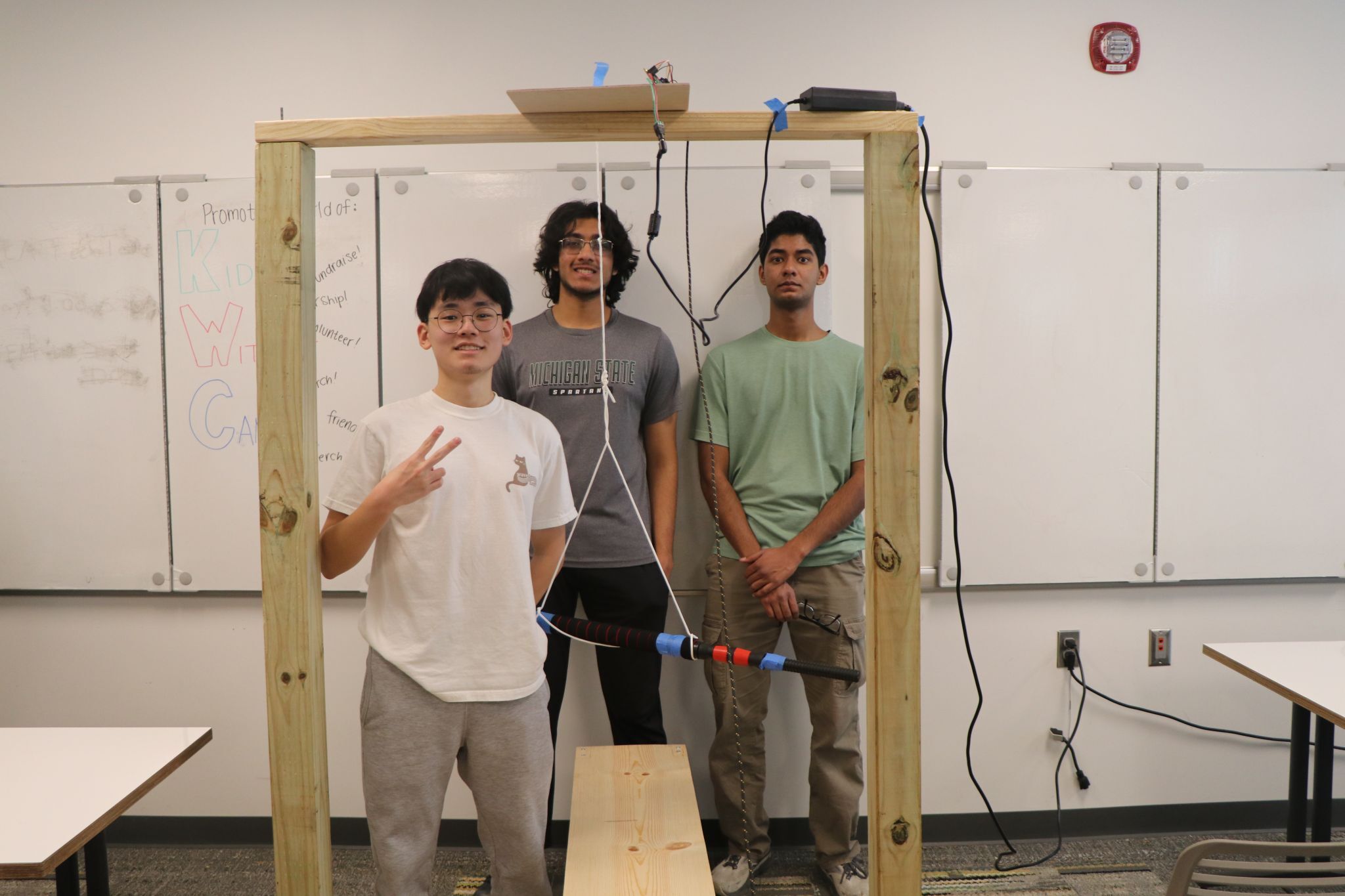
Runner-up at SpartaHack 11 with AutoSpot — a computer vision-powered solo lifting safety system. I architected the control system using a Teensy 4.1 and L298 logic controller driving a high-torque worm gear assembly, capable of a 150 lb vertical lift for under $70.
Studying graduate-level multi-objective optimization, developing a custom region-based domination framework that generalizes Pareto dominance. Built on top of NSGA-II, currently reimplementing in Python using pymoo for improved flexibility and sampling control.